
�������: 1-15 ���鵽��֪ʶ�� MEMS����ؼ�¼254�� . ��ѯʱ��(0.093 ��)
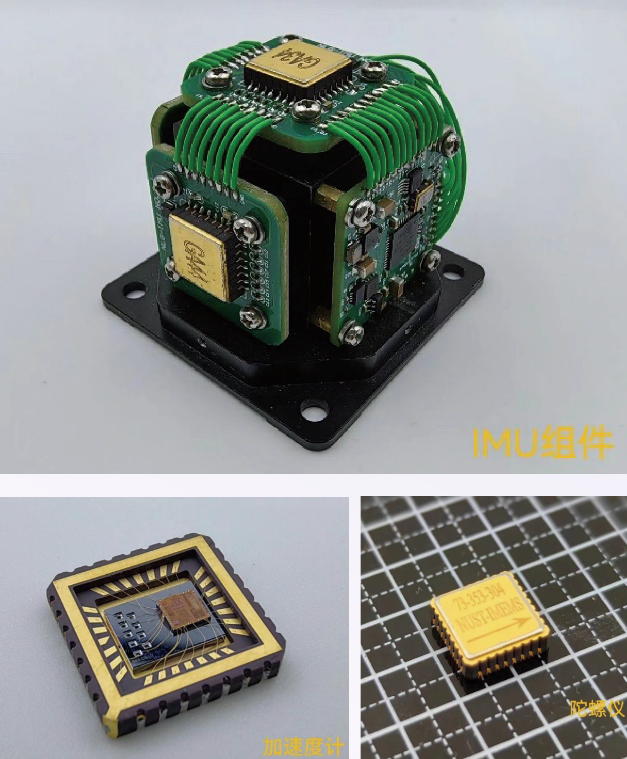
��Ը߾��ȡ�������MEMS���ٶȼơ������ǵ�ȫ��������������������ڸ߾��ȡ������ܼ��ٶȼơ������ǵĽṹ��ơ���Բ�����칤�ռ�⡢�Ƚ���װ��ר�ü��ɵ�·�ȷ��濪չ�о���ͻ����ȫ������ȫ�����и߶�MEMS����������Ƭ���գ�����ָ��ӽ��������ֳ�Խ����������Ʒ������������ӡ����⡣��Ҫ��Ʒ�������������£�1��MEMS�����ǣ�����<1%����ת�ٷֱ���������������1�㣬��ƫ���ȶ��Լ�Ѱ�����Ƚӽ���H...

��е���&MEMS��أ�ͼ��
��е��� MEMS��� ��· ����ͨ��
2024/10/17
����ͨ��ϵͳ�У���أ�Optical Switch��OS����Ҫ���ڹ�·��ʵ�ֹ��źŵ������л��������������������ڹ⽻������OXC��Optical Cross��connect����������Ϊ�л���·�Ĺؼ�������
MEMSѹ����������ԭ����Ӧ��
MEMS ѹ�������� ���� ��еϵͳ
2024/10/17
MEMS��Micro Electro Mechanical systems����д�������ӻ�еϵͳ��MEMS��������Ϊ21���;��и����Եĸ��¼���֮һ��������20����50��������ӻ�еϵͳ(MEMS)������ָ����/���ײ��Ͻ�����ơ����졢�����Ϳ��Ƶļ�����MEMSѹ�����������������Ӽ������ӹ�����(���������ӹ���������ӹ������ϵȼ���)���ϵ����칤�գ������ѹ����������MEMSѹ��...

MEMS��˷磨Micro-Electro-Mechanical Systems Microphone����һ�ֻ�����е�ṹ����ѧ�����������Ĺ���ԭ���漰��С�Ļ�е����֮��صĵ�ѧ�ź�ת����������MEMS��˷�ļ�Ҫ����ԭ������Ĥ��Ӧ����Ĥ��缫֮��Ŀ���϶��仯�����ݵı仯���缫֮��ĵ����仯��ģ��ת����ͨ����Щ���̣�MEMS��˷罫�����ź�ת��Ϊ��ѧ�źţ��Ӷ�ʵ�������IJ��ʹ��ݡ�M...
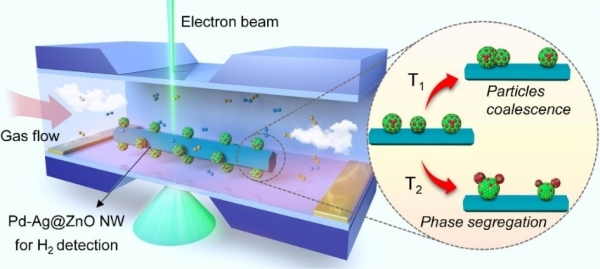
�й���ѧԺ�Ϻ�ϵͳ����Ϣ�����о�������MEMSоƬ����ԭλTEM������ʾ������������ʧЧ���ƣ�ͼ��
MEMSоƬ ����ԭλTEM���� ��羵
2022/9/22
���գ��й���ѧԺ�Ϻ�ϵͳ����Ϣ�����о����о�Ա������ŶӲ��û���MEMSоƬ������ԭλ��羵��TEM������������̽����Pd-Ag�Ͻ�������������MEMS�������������������µ�ʧЧ���ƣ�ͼ1����2022��4��13�գ�����о��ɹ���ΪSupplementary Cover���ģ���In Situ TEM Technique Revealing the Deactivation Mechanism...
���������ֻ����õĴ���������չ����Ƶ�źź�MEMS�������Ľ�������ڶ�λ�о������ȣ���ʱƵ��������������Ƶ�ź�TOA���ƣ������һ�ֻ��ڶ�ʱ����Ҷ�任���Ż�����ط������������Ʒ�����֮���о���һ�ֻ�����ƵTDOA�����˺�������Ľ���϶�λ�㷨����̬���Ե�ƽ����λ����Ϊ0.238 m�������С���˷��������38.66%�������Զ�̬��λ�д��ڵ����⣬�о���һ�ֻ���Ԥ��״̬�Ķ�����ЧӦ�������첽��...
��Ի����������������ϴ�����������ֵ������⣬�����һ�����ڵ��ز����ǵĻ���BFGS�㷨���Զ����㷽���������̿��Աܿ�����ţ�ٵ�������ɭ�����������ȱ�ݣ���֤�Ͽ�������ٶȣ�����DSP���ٵ���⡣DSP�������ֵ�λ����ȷ���㣬������������ʱ�乤��״̬���ɴ�������Ư�����Ļ����۽�ϵͳ���������ʵ�顢ʵ��ģ��ʵ�����ֵ��������֤�˴˷����Ŀɿ��ԡ�
����ABAQUS����ƽ̨��������ײ����ͬӲ��Ŀ��ģ���Լ�MEMS���Կ���ģ�ͣ������˵���ײ��Ŀ������еĹ��Թ�����������Կ�����ײ������������µıպ��������ϵ��������������Լ�Ŀ��ʶ������������MEMS���Դ�����·���Կ��أ����������MEMS���Դ�����·���ԶԷ��յ����������ؽ���ȷ�IJ�������������س���300��g��ʱ��MEMS���Դ�����·������Ч�𱬴������У����������С��300��g��...
����MEMS���Ű�ȫϵͳ�Ĺ���ԭ����������Ӧ����MEMS���ŵĻ������������ԣ��ܽ��˻���������MEMS��ȫϵͳ�е���Ҫ���ܣ������MEMS�����û���������ƹ�������Ҫ����Ĺؼ����⣬ΪMEMS���Ű�ȫϵͳ����ػ�����������ṩ�˲ο���
����MEMS����У˫Ŀ����
�۲��豸 ˫Ŀ�Ӿ� ˫Ŀ��� ��У MEMS ˫Ŀ�������ģ��
2020/4/24
�����һ�ֻ���MEMS��У˫Ŀ����������IMU��̬�������������ŷ������Ϊ����ͷ������Уƽ̨������˫Ŀ�������ģ�ͽ��в�ࡣ����������÷�������IMU��̬������������Ч��У����ͷ���ᣬʹ����ȫƽ�У�ͬʱ˫Ŀ�������ģ�Ͳ�ྫȷ�Ⱥ��ٶȽϸߣ������Ӿ����ľ�ȷ�ԡ�����������
����MEMS�������������ͳ��ص����ں��㷨�о�
���Ե��� �����˶�ѧԼ�� ��̬�������� �������˲� ������������
2020/3/3
���MEMS����������������ϵͳ��λ�����ʱ���ۻ����⣬�����һ�ֶ�̬������������������������ϵ��ںϵ����㷨���ɶ����Ժͷ����������Ч���ơ�����������뵥��ʹ�ö�̬����������ȣ����ں��㷨���Դ�����ϵͳ���㾫�ȣ���60 s���Ե����У����������λ��������0.95 m��ʵ���˳��عߵ�ϵͳ�ͳɱ��߾�������������
ǿ��۲���MEMS�ͼ��ٶȼ��о�
ǿ��۲� MEMS���ٶȼ� �ջ� ��ƽ�� ����������
2018/12/29
ǿ��۲��м�¼�ļ��ٶ�ʱ���dz��д��ͽ���������Ƶ���Ҫ���ݣ�Ϊ���п�������ṩ�ɿ�������֧�֡���ˣ��Լ��ٶȼ����ȶ��ԡ����Զȡ���̬��Χ��ֱ����Ӧ�����ܷ������źܸߵ�Ҫ��������þ������������Ƽ����봫�������������γɱջ���ƽ��ʽMEMS���ٶȼƣ�ʹ֮�������õĵ�Ƶ���ԡ��������Ľצ�����������ɵ������źŲ�����ȷ���䶯̬��Χ����140 dB����ȫ��������ǿ��۲�淶�Ը���ָ���Ҫ��
����MEMS/�����Ļ��������������������
����� ������������ ���Բ�����Ԫ �������ջ� ���������˲���
2018/1/15
���ñ�����λϵͳ���㵯���켣������MEMS���Բ�����Ԫ���㵯�����Բ�������ͨ�����������˲�����UKF�������ߵ����ݽ��������ںϣ�����ߵ������������ľ��ȡ������˸����������IJ�����������������������˲�����������ij���Ƶ�������������ɶȷ������ݶ���ϵ����㷨������֤����������������������UKF��MEMS/������ϲ��������ܹ���Ч�ضԻ�����ĵ����������в�������ͨ��UKF�˲������������ں��ܹ���...
Ϊ�����MEMS���Կ��صij���ɿ��ԣ������һ������ֹ���ṹ�����ȣ����������Ӵ������۽�����ֹ����ײģ�ͣ�ͨ��Simulink��ģ�ͽ��з��棬�о������ڲ�ֹͬ����ʽ�µ���Ӧ���ԡ����ţ��ӿռ�ռ�ú�Ӧ�����еĽǶȶ���������ƽ����������ֹ����ʽ�������ۣ����ֹ���ṹ���������UV-LIGA������������������ͨ���䴸���ϵͳ���������в��ԡ���ײ�Ӵ������ڳ���ɿ���������Ҫ��Simulink��������...
MEMSϵͳ��ƽ��ṹ������������о�
MEMS ƽ�� ��Ĥ�� ������ʧ
2019/1/2
����ϵͳ(micro-electro-mechanical system��MEMS) ��ָ�ڲ��ṹ�ߴ����������������������ӻ�еװ�ã���һ������������ϵͳ. �������������������ƽ��ΪMEMS �еĵ��ͽṹ������ѧ����ѧ����ֱ��Ӱ��MEMS ������. ���ͬʱ����ѹ��������Ĥ��(ͨ��������ͬ�ߴ�ƽ��������) ���õ��ı�֧ƽ��ṹ��Ӧ��Cosserat ���ۺ�Hamilton ԭ...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...